
ページ |
: |
誤 |
 |
正 |
 |
vi
(1刷) |
: |
●下から15行目
(2) プログラムとコンパイル・ダウンロード |
|
(2) プログラムとコンパイル・アップロード |
|
ix
(1刷) |
: |
●上から3行目
(4) デジタル入力ピンの電源とGNDのテクニック |
|
(4) デジタル入力ポートの電源とGNDのテクニック |
|
10
(1刷) |
: |
●下から3行目
ルネサス社が開発した |
|
ルネサス製のマイコンモジュールを搭載した |
|
14
(~2刷) |
: |
 |
|
14
(1刷) |
: |
●下から7行目
データ送受信を行われます。 |
|
データ送受信が行われます。 |
|
15
(1刷) |
: |
●上から2行目
6個のアナログ入力ピンです。このピンは、デジタル入出力ピンのD14から |
|
6個のアナログ入力ポートです。このポートは、デジタル入出力ポートのD14から |
|
15
(1刷) |
: |
●上から5行目
アナログ入出力を行うピンで、 |
|
アナログ入出力を行うポートで、 |
|
15
(1刷) |
: |
●上から8~9行目
デジタル入力ピンとなりますが、アナログ入力ピンのA0からA5までもデジタル入出力ピンのD14からD19までとして利用できます。この中のピンで |
|
デジタル入力ポートとなりますが、アナログ入力ポートのA0からA5までもデジタル入出力ポートのD14からD19までとして利用できます。この中のポートで |
|
35
(1刷) |
: |
●下から3行目
Blink(明滅する) |
|
Blink(点滅する) |
|
36
(1刷) |
: |
●2番目(下)のソースコード
 |
|
 |
|
40
(1刷) |
: |
●図2.7 上段から3つ目のボックス
digitalWrite(led,HIGH); |
|
digitalWrite(led,LOW); |
|
43
(1刷) |
: |
●本文下から1行目
wiret(“+++ Uno R3 test ++++\n”); |
|
wiret(“+++ Uno R3 test +++\n”);
※testの後ろの「+」は三つだけ。 |
|
44
(1刷) |
: |
●2.4節の表題
ジャンバワイヤ |
|
ジャンパワイヤ |
|
46
(~2刷) |
: |
●2.5節2行目
構成図(P.13)にも示した |
|
構成図(P.14)にも示した |
|
47
(1刷) |
: |
●下から3行目
A5番ピンまで利用できます。 |
|
A5番ピンまでを拡張デジタル入出力ポートとしても利用できます。 |
|
51
(1刷) |
: |
●節タイトル
(2) プログラムとコンパイル・ダウンロード |
|
(2) プログラムとコンパイル・アップロード |
|
54
(1刷) |
: |
●表3.1中の実数の例
 |
|
 |
|
57
(1刷) |
: |
●表3.6 演算子一覧(分類の下から2項目)
>> 右シフト
x=[0101 1000]つまりx=0x58=88;
<< 左シフト
x=[0001 0010]つまりx=0x12=18;
x=[0110 1001]つまりx=0x69=105; |
|
<< 左シフト
y=[0101 1000]つまりy=0x58=88;
>> 右シフト
y=[0001 0010]つまりy=0x12=18;
y=[0110 1001]つまりy=0x69=105; |
|
63
(1刷) |
: |
●上から2行目
以下のスケッチ3.4 |
|
以下のスケッチ3.5 |
|
63
(1刷) |
: |
●上から4行目
常に変数が初期化されて「1」 |
|
常に変数が初期化されて「0」 |
|
67
(1刷) |
: |
●「for制御文の記述式」ソースコード
 |
|
 |
|
70
(1刷) |
: |
●下から18行目
millis関数は、3.6(⑤)を参照 |
|
millis関数は、3.6(4)を参照 |
|
72
(~2刷) |
: |
●スケッチ3.11下から4行目
void loop() { |
|
void loop() {} |
|
81
(1刷) |
: |
●表4.1 「デジタル入力」列下段
digitalRead関数を利用する |
|
pinMode関数とdigitalRead関数を利用する |
|
81
(1刷) |
: |
●表4.2 「Auduino Uno入力処理系のピン(関連関数)」列下段
①D0~D13ピン対応(digitalRead関数を利用する) |
|
①D0~D13ピン対応(pinMode関数とdigitalRead関数を利用する) |
|
87
(1刷) |
: |
●中段の「変換式2」
(float)analogRead(A0) / 4.8888E-3 |
|
(float)analogRead(A0) * 4.8888E-3 |
|
98
(1刷) |
: |
●表5.1 「デジタル出力」列下段
digitalRead関数を利用 |
|
pinMode関数とdigitalRead関数を利用 |
|
99
(1刷) |
: |
●表5.2 「Auduino UNO出力処理系のピン(関連関数)」列下段
①D0~D13ピン対応(digitalRead関数利用) |
|
①D0~D13ピン対応(pinMode関数とdigitalRead関数利用) |
|
99
(1刷) |
: |
●下から6~5行目
(第1章「図1.14 マイコンボードの構成図」を参照)。 |
|
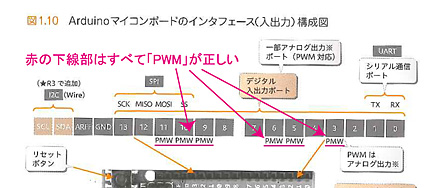
(第1章P.14の「図1.10 Arduinoマイコンボードのインタフェース(入出力)構成図」を参照)。 |
|
104
(1刷) |
: |
●上から3行目
「HITH」 |
|
「HIGH」 |
|
107
(1刷) |
: |
●下から4行目
10回繰り返しています。 |
|
10回繰り返す変数となります。 |
|
109
(1刷) |
: |
●表5.1 右2列
 |
|
 |
|
111
(~2刷) |
: |
●下から4行目
HIGHとLOWが同じ周期(fg)で |
|
HIGHとLOWが同じ周期(fq)で |
|
114
(~2刷) |
: |
●下から1行目
「analogWright」関数の「v/0123.0*255」という引数は、「analogRead(a4)」 |
|
「analogWrite」関数の「v/0123.0*255」という引数は、「analogRead(A4)」 |
|
125
(~2刷) |
: |
●上から7行目
"temp= %d,%d C" |
|
"temp= %d.%d C"
※dの後ろは、正しくはピリオドです(カンマは誤り)。 |
|
132
(~2刷) |
: |
●スケッチ6.7上から4行目
acc_print('x',A0); |
|
acc_print('X',A0); |
|
134
(1刷) |
: |
●表6.1 「HS-SR04」列の2段目および「SEN136B5B」列の2段目
グラインド |
|
グラウンド |
|
154
(~2刷) |
: |
●7.1節1行目
Arduinoには、電源が入ったときからの |
|
Arduinoには、プログラムが実行したときからの |
|
154
(1刷) |
: |
●下から2行目
時間間隔で中断(停止)する |
|
時間間隔で待機(保留)する |
|
154
(1刷) |
: |
●表7.2タイトル
表7.2 プログラムを中断する関数 |
|
表7.2 プログラムを待機する関数 |
|
154
(1刷) |
: |
●表7.2 「説明」列の1段目および2段目
だけ中断 |
|
だけ待機 |
|
155
(1刷) |
: |
●スケッチ7.1のタイトル
LEDを点滅/消灯する |
|
LEDを点灯/消灯する |
|
155
(1刷) |
: |
●スケッチ7.2のタイトル
LEDを点滅/消灯する |
|
LEDを点灯/消灯する |
|
156
(1刷) |
: |
●図7.1のタイトル
点灯スケッチの |
|
点灯/消灯スケッチの |
|
163
(1刷) |
: |
●表7.4中の関数名
void attachInterrup(byte int, |
|
void attachInterrupt(byte int, |
|
165
(1刷) |
: |
●表7.5 「説明」列下から2段目
キャリッジリターン「\r」とニューライン「\n」を付けて送信 |
|
キャリッジリターン「¥r」とニューライン「¥n」を付けて送信 |
|
166
(1刷) |
: |
●下から2行目
アナログポート |
|
アナログ入力ポート |
|
174
(1刷) |
: |
●下から6行目
014052)② |
|
014052)② <本電子部品は、はんだ付けが必要となります> |
|
175
(1刷) |
: |
●早見表内 一番下の「シリアルモニタ画面」内のスケッチ利用まとめ
一番上段
Srial.begin(spd); |
|
Serial.begin(spd); |
|
176
(1刷) |
: |
●図内右下の吹き出し
②湿度センサー |
|
②温度センサー |
|